Locomotion
Week 1 • CMPSC 304 Robotic Agents
Press Space or → to advance
Today's Agenda
- What is actuation?
- Locomotion vs. manipulation
- Static vs. dynamic stability
- Degrees of Freedom (DoF)
- Wheel types and kinematics
Actuation: Making Robots Move
Two key types:
- Locomotion: Moving the robot itself
- Manipulation: Moving objects in the environment
The Duality of Movement
Both use the same principle:
- Motors exert forces on the environment
- Locomotion: Forces on ground/water/air → robot moves
- Manipulation: Forces on objects → objects move
Locomotion Methods
Trade-offs: energy efficiency, terrain, speed, stability, cost
Energy Efficiency
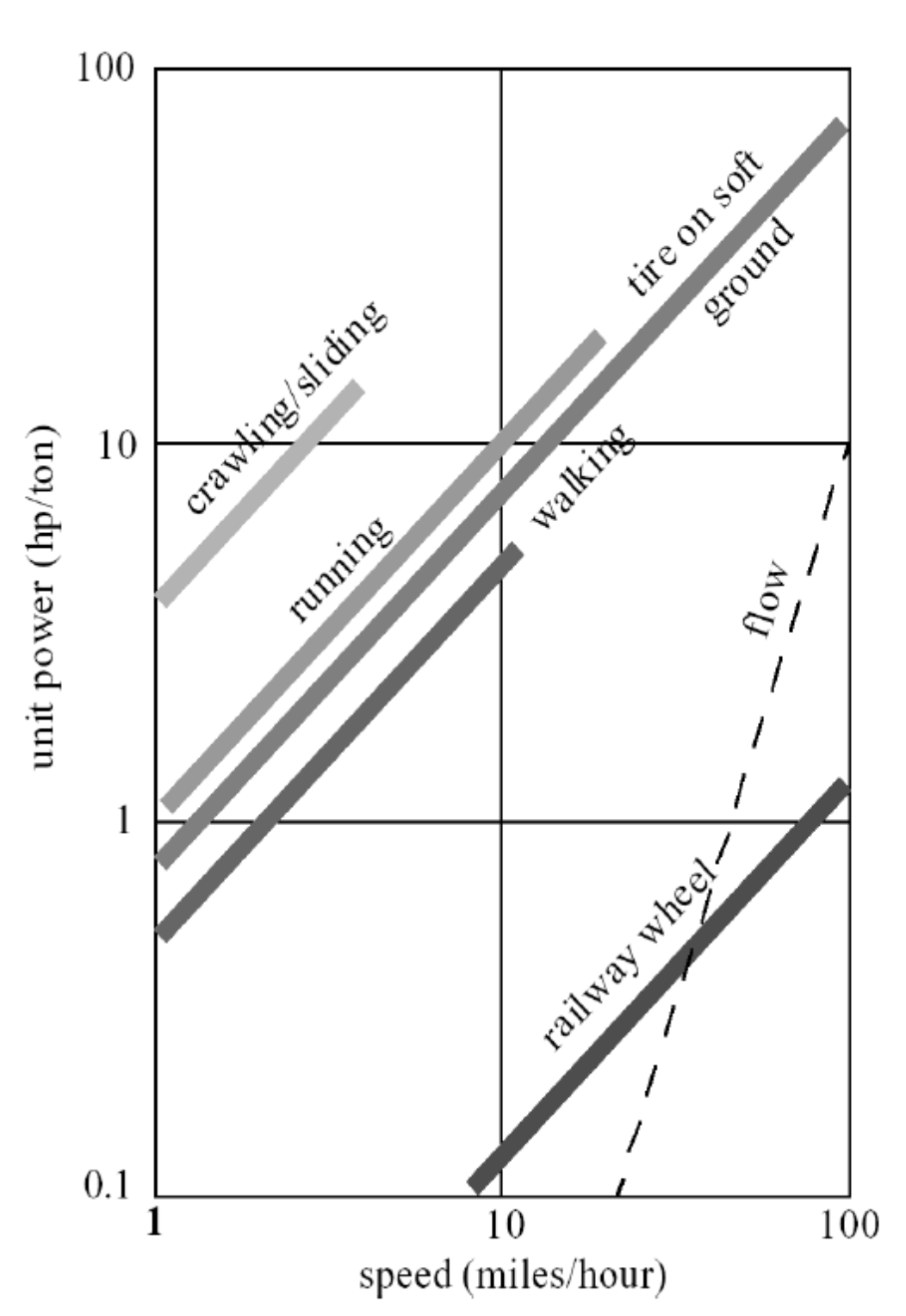
Railway wheels ~10× more efficient than walking
But Wheels Have Limits
Great For:
- ✓ Roads
- ✓ Warehouses
- ✓ Flat floors
Poor For:
- ✗ Forests
- ✗ Mountains
- ✗ Rough terrain
This is why evolution never created wheeled animals
Stability Types
Static
Won't fall when not moving
- ✓ Stable at rest
- ✓ Slower movements
- ✓ Simpler control
Dynamic
Requires constant motion
- ✓ Faster, agile
- ✗ Complex control
- ✗ Always actuating
Stability Principle
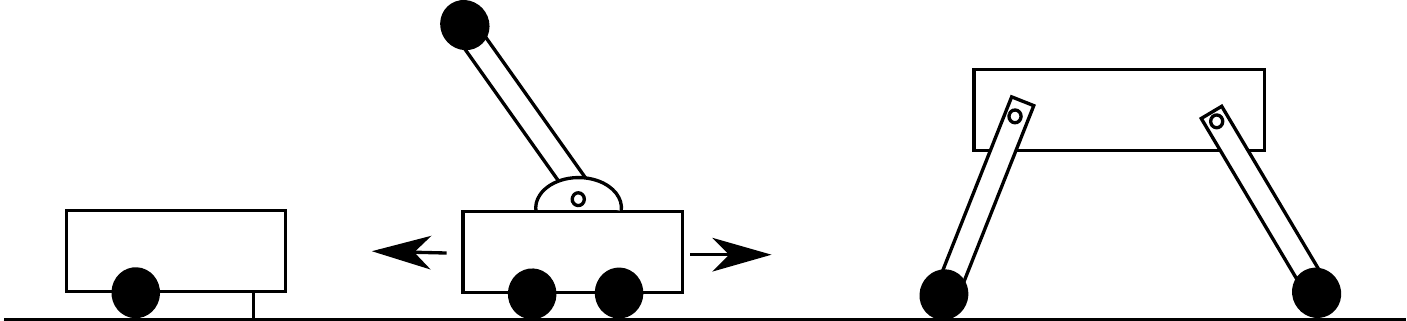
- Left: Static (stable at rest)
- Middle: Dynamic (must keep moving)
- Right: Both modes possible
Real-World Examples
Six Legs
(Insects, hexapods)
- Statically stable walking
- Move 3 legs at a time
- Triangle always supports
Four Legs
(Dogs, quadruped robots)
- Walking = static
- Running = dynamic
- Switch between modes
Degrees of Freedom (DoF)
Two types to distinguish:
- Cartesian DoF: Positions/orientations in space
(Maximum 6 in 3D space) - Mechanical DoF: Number of actuated joints
(Depends on robot design)
Cartesian DoF (3D Space)
- Forward/back
- Left/right
- Up/down
- Pitch
- Yaw
- Roll
Wheel Types & DoF

Different wheel types enable different mobility
Standard Wheel (2 DoF)
Two degrees of freedom:
- Rotation around the wheel axle
- Rotation around ground contact point
Cannot move sideways (would require skidding)
Example: Bicycle wheel, car wheel
Caster Wheel (3 DoF)
Three degrees of freedom:
- Rotation around the wheel axle
- Rotation around ground contact
- Rotation around the caster axis
Example: Shopping cart, office chair
Swedish/Mecanum Wheel (3 DoF)
Three degrees of freedom:
- Rotation around main wheel axle
- Rotation around ground contact
- Rotation around roller axles
Result: True omnidirectional movement!
Kinematic Constraints
2-DoF wheels = Constrained movement
- A car can parallel park
- Requires multiple maneuvers
- Like a knight on a chessboard
Mobile Robot DoF on a Plane
A plane has 3 Cartesian DoF:
- X position (horizontal)
- Y position (vertical)
- Orientation (angle θ)
May need multiple moves to reach certain poses
Manipulator Arms: Mechanical DoF
On a plane (2D workspace):
- Up/down position
- Left/right position
- End-effector orientation
3 Cartesian DoF needed → Need ≥3 joints
Joint Types
Revolute (Rotary)
- Most common
- Rotates around an axis
- Example: Elbow, shoulder
Prismatic (Linear)
- Extends and contracts
- Slides along an axis
- Example: Telescope, piston
Design Trade-offs
Choosing kinematics involves balancing:
- Mechanical complexity
- Maneuverability
- Precision
- Cost
- Ease of control
• Differential: cheap, maneuverable, hard to drive straight
• Car: expensive, precise, hard to parallel park
Real Robot: Differential Drive
Configuration:
- Two powered wheels on shared axis
- One (or two) caster wheels for support
Advantages
- Very maneuverable
- Simple control
- Low cost
Challenge
- Hard to drive straight
- Needs matched motors
- Wheel wear issues
Key Takeaways
- Actuation enables locomotion and manipulation
- Stability can be static (at rest) or dynamic (requires motion)
- DoF describes what movements are possible
- Wheel type determines mobility constraints
- Design choices involve complex trade-offs
Before Next Class
Think about:
- What DoF does your robot need?
- Static or dynamic stability?
- Which wheel configuration?
- What trade-offs will you make?
Questions?
- Submit components list and team contract
- Finish Design
- Mechanical build
- Wiring and power
- Basic control
Readings: IAR Chapters 2 & 6